The Evolution of Artificial Intelligence
The tech we use nowadays is the outcome of a number of artificial intelligence milestones achieved by many unsung heroes. We travelled back in time and compiled a list of all significant artificial intelligence achievements that have allowed us to enjoy our current lifestyle. Let’s take a look at AI evolution over time. The timeline below highlights AI milestones that have been achieved throughout history. These achievements can be found in all areas of Artificial Intelligence. Because this is a growing timeline, new milestones will be updated on a regular basis.
Timeline

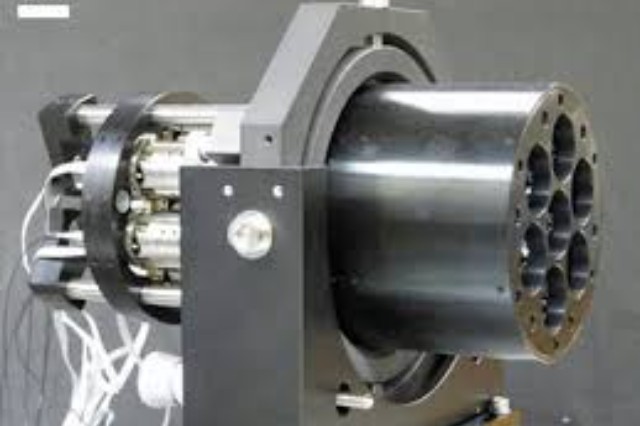
Pocket Delta Robot

It was a microrobot having a parallel structure called Delta Robot. The robot was designed to perform micro-assembly tasks with high speed and high precision. Read more November, 2004
Real-time Face Detection
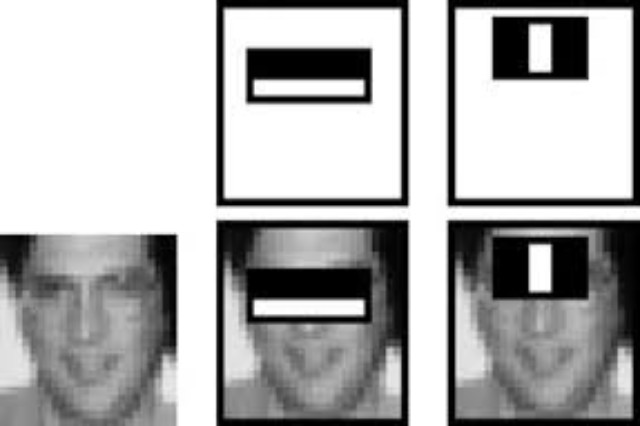
The machine learning approach of sliding-window was used for Real-time Face Detection. It was based on robust face detection technology to recognize objects in real-time. Read more July, 2004
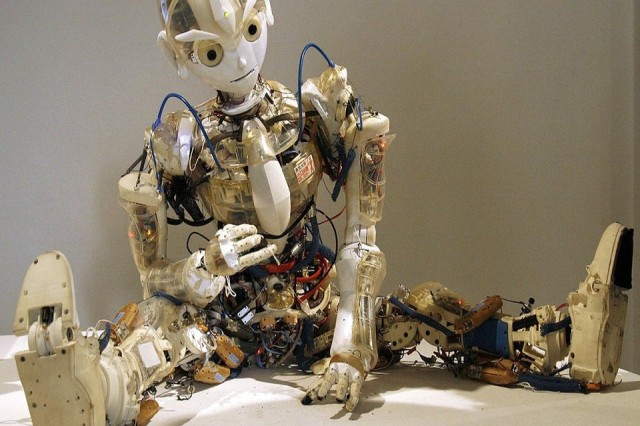
KHR-1 Bipedal Humanoid Robot

KHR-1 was a programmable robot developed by a Japanese Kondo Kagaku company. It was one of the most expensive robots when released, with 34 cm in height and 17 degrees of freedom. Read more June, 2004
Launching Spirit and Opportunity Via NASA’s Mars Exploration Rover Mission

The two robots autonomously navigated the surface of Mars by exploration rover mission. Spirit was also known as MER-A, landed on Mars and stayed active from 2004 to 2010. The Opportunity robot, also known as Oppy, was functional on Mars from 2004 to 2018. Read more April, 2004
First DNA Robot Capable Of Bipedal Motion

Chemists Nadrian Seeman and William Sherman built this first two-footed molecular robot. The given DNA robot was capable of bipedal motion. Its legs were made of two strands of DNA, each 10nm long. It was a significant success towards nanotechnology and molecular gadgets. Read more April, 2004
ASIMO Robot Launched by Honda

ASIMO Robot was an artificial intelligence humanoid robot capable of walking as fast as humans. It could be an assistant in restaurants to deliver trays to the customers. It was powered by a rechargeable Lithium-ion battery of 51.8 volts. Read more March, 2004
AI Technique For Automated Protein Structure Determination
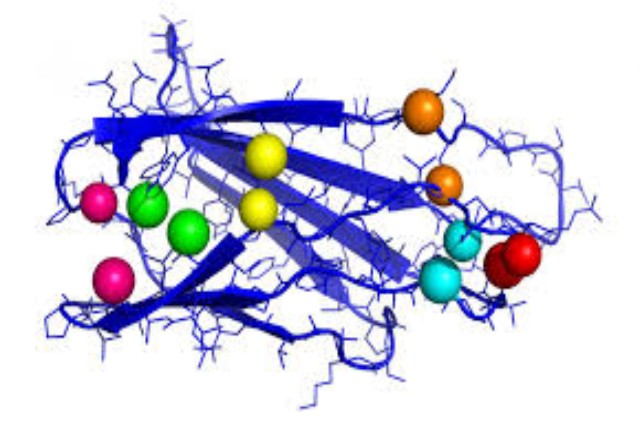
The system was efficient enough in automated protein structure determination even with minute data information. It ran over a variety of actual electron density maps and automatically generated an accurate protein structure. Read more November, 2003
Automatic Detection of Steganography
In this Automatic Detection of Steganography application, machine learning was used to detect secret messages in electronic images, audios, and videos. The researchers trained the algorithms to work in both content and compression-type image formats. The trained system can also detect previous steganography techniques. Read more September, 2003
Experimental Robot By Lewis Took Photographs Of People On Social Events
The autonomous experimental robot can navigate through the environment and take photographs of people. The system comes with two digital cameras placed on an iRobot mobile robot platform. The robot ran for more than 40 hours over five days. Further, it interacted with almost 5,000 people and took over 3000..Read more
The First Learning System For Humanoid Robots Developed By Fujitsu Laboratories
The system utilized a dynamically reconfigurable neural network. The new mathematical model prepared by the researchers was focused on the human nervous system. This first learning system for humanoid robots helps them to learn about motor coordination and the movement quickly. Neural networks in the past took days and even..Read more
Criterion Online Essay Evaluation
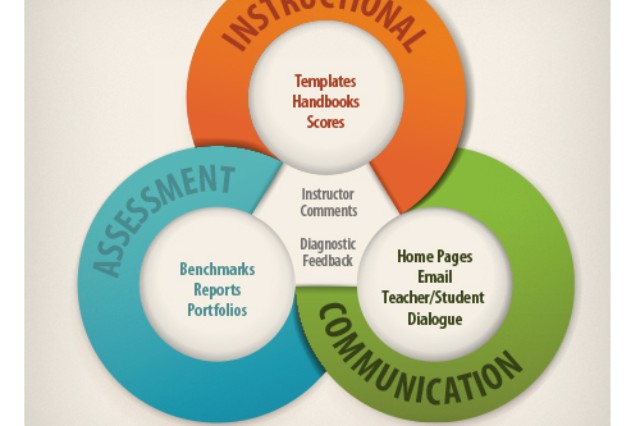
Criterion Online essay evaluation is done by using natural language processing and machine learning. Education Testing Service is committed to providing fair assessment instruments. It is a web-based educational system that offers automatic scoring and student evaluation. The application removed the load on teachers in reading and evaluating more than..Read more
Massive Multiplayer Online Role-Playing Games (MMORPG) With Better Graphics

Massive Multiplayer Online Role-Playing Games offered the ever-best graphics and allowed players to assume spaceship commands via an artificial intelligence system. The players could combat against other players or their environment in the game. The players gained skills in real-time even without logging-in to the game. Over half a million..Read more
Skin Customer Relationship Management: A Telephone-Based Application

Skin Customer Relationship Management (Skin-CRM) provides door-to-door cosmetic support service. The salesperson took the image of a customer’s skin via camera, email software, and a web browser. Then the image is sent by email to the analysis system. The output is available on a customer-accessible website within minutes. Plus, it..Read more
CSAIL: The Computer Science and Artificial Intelligence Laboratory At MIT

CSAIL is formed by the combination of the Laboratory for Computer Science and Artificial Intelligence Laboratory. John McCarthy and Marvin Minsky founded the AI lab in 1959, while Computer Science Laboratory was created as MAC project in 1963. Read more January, 2003
DARPA’s Centibot Project
DARPA’s Centibot was the first collaborative robot that consisted of a group of mobile robots that could survey an area and build a real-time map. It didn’t require human supervision plus point. Read more December, 2002
Roomba From The iRobot Corp By Rodney Brooks

Roomba is the Domestic Robotic Vaccum system from the iRobot Corp by Rodney Brooks. It was the first household cleaning robot that was able to detect and avoid hurdles. Moreover, it could navigate within a house without using location maps. This Frisbee-shaped robot was the first successful domestic robot in..Read more
Torch Machine Learning Library

A software library for machine learning, Torch was first released this year. It came with all algorithms that were introduced at that time. All these complex algorithms have already been implemented in a unified framework. Read more August, 2002
Active Stereo with Structured Light
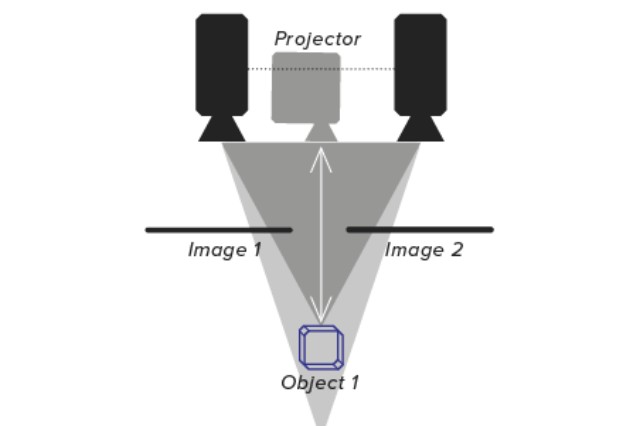
Zhang first introduced the idea of using active stereo light patterns for estimating robust correspondence between a pair of images. Read more May, 2002
The iRobot PackBots Developed By Endeavor Robotics

The iRobot PackBots is responsible for performing multi-tasks developed by Endeavor Robotics. They were first searched through the ruins of the World Trade Center after the September 11 terrorist attack. The new and advanced forms of iRobots are in use in Afghanistan and Iraq. Read more September, 2001
Introduction Of CyberKnife By The FDA

The FDA announced that their CyberKnife could treat tumors (kill tumor-causing cells) anywhere in the body. The treatment usually requires 1 to5 session to be performed completely. Plus, it reduces the chances of death during and after the patient’s treatment with its submillimetric accuracy. Read more August, 2001
Space Station Remote Manipulator System (SSRMS) Developed By MD Robotics Of Canada

The company launched Space Station Remote Manipulator System to assemble and maintain the international space station successfully. It was involved in moving objects, equipment, and supplies around the station. Read more April, 2001
Graphics Processing Unit (GPU) by NVIDIA

NVIDIA introduced the graphics processing unit system to integrate chips with image formation/ rendering engines. It is a particular electronic circuit that is designed for the professional and gaming industries. Automotive and mobile computing markets also use this exceptional system. Read more January, 2001
The First Neural Language Model Introduced By Yoshio Bengio And His Team

They used the feed-forward neural network to introduce the first neural language model. It described an artificial neural network that didn’t use the connection to form a cycle. It’s quite different from the recurrent neural network. In this system, the data moved in one direction from input to output nodes...Read more
Bag of Words In Computer Vision
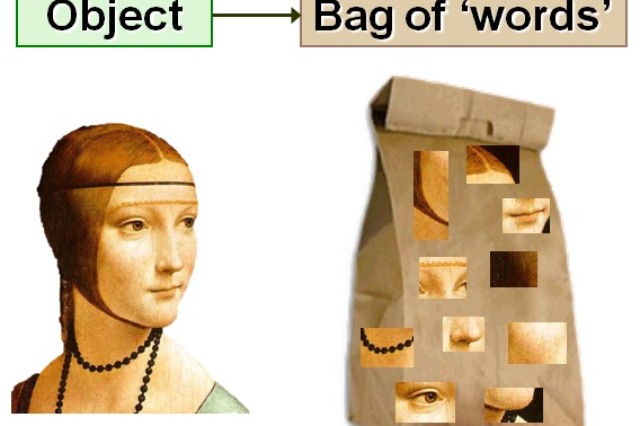
Bag of Words in Computer Vision represents visual features as words. Plus, it allowed natural language processing (NLP) information to recognize objects and classify images. Read more January, 2001
Hawk-Eye Computer System Developed By Dr. Paul Hawkins
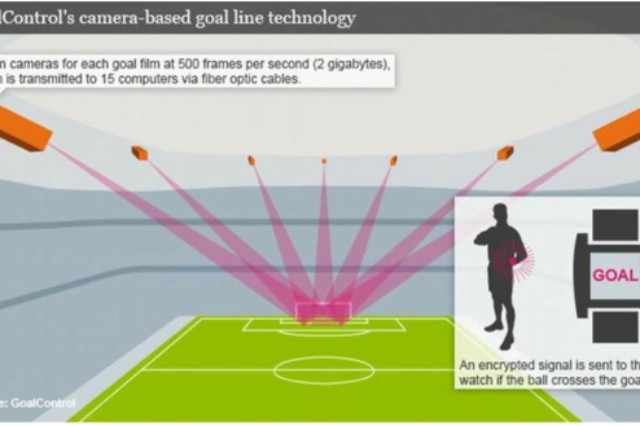
The computer system was developed for cricket, tennis, and other sports to track the ball’s path by Dr. Paul Hawkins. He was working at Roke Manor Research Limited. The given Hawk-Eye Computer System is linked with a computer, and more than six television cameras are situated at a high level..Read more
First Robotic Surgeon Approved By FDA For Laparoscopic Surgery

DaVinci Surgical System is the first robotic surgeon approved by FDA for minimally invasive laparoscopic surgeries with high accuracy and low error. Now, there are more than 1500 hospitals that have DaVinci surgical system. Created by a tech giant named Intuitive, Devinci covers a total number of approximately 5500 worldwide...Read more
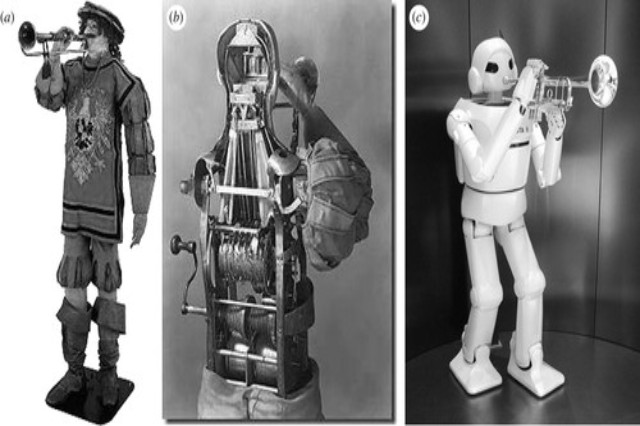
Kismet Robot Developed By Professor Cynthia Breazea
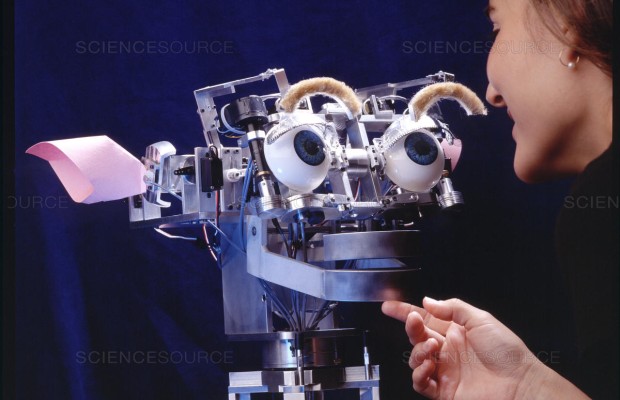
A Kismet robot is a bot with a head part developed as an experiment for affective computing (a machine with emotional stimulation and recognition). For interaction with humans, the input part consists of proprioception, visual, and auditory abilities. Facial expression movements include a head, ears, jaw, lips, eyelids, and eyebrows...Read more
Semantic Web By Berners-Lee
Semantic Web is also known as “Web 3.0”, and its architecture is illustrated through Stack. It is possible to perform machine processing directly or indirectly on the web that contains data. Using Fuzzy Logic, Automated reasoning systems, and Probabilistic reasoning techniques, it deals with the issues related to web-like deceit,..Read more
AIBO Toy Robot Developed By Sony
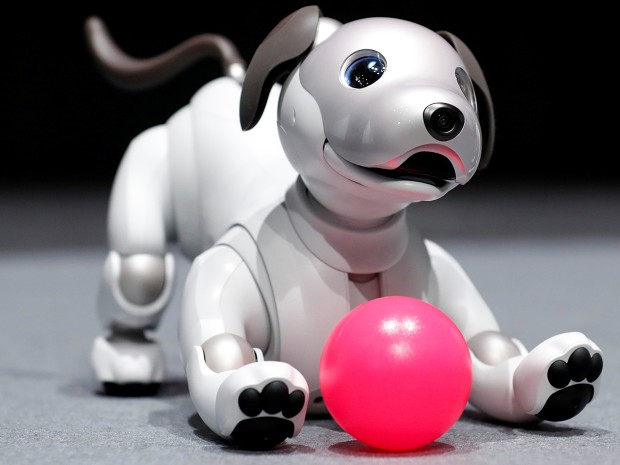
AIBO toy robot is an Artificial Intelligence Robot that was developed as a pet dog for entertaining kids. It has a CPU as a brain, 20 points ability to move, sensors as sensory organs, and application software “memory stick” to control functions. The human can easily determine the desires of..Read more
Intelligent Room and Emotional Agents at MIT AI Lab

The project’s major goal to start Intelligent Room and Emotional Agents (robots that could understand human emotion) was to enter the computer into the real-world so that they could cooperate according to human needs. A layer-based architecture with vision capabilities is built to determine whether humans are talking to each..Read more